GPDBN: A Smooth Generative Model of Shape with Uncertainty Propagation

Overview
The shape of an object is an important characteristic for many vision problems such as segmentation, detection and tracking. Being independent of appearance, it is possible to generalize to a large range of objects from only small amounts of data. However, shapes represented as silhouette images are challenging to model due to complicated likelihood functions leading to intractable posteriors. In this paper we present a generative model of shapes which provides a low dimensional latent encoding which importantly resides on a smooth manifold with respect to the silhouette images. The proposed model propagates uncertainty in a principled manner allowing it to learn from small amounts of data and pro- viding predictions with associated uncertainty. We provide experiments that show how our proposed model provides favorable quantitative results compared with the state-of-the-art while simultaneously providing a representation that resides on a low-dimensional interpretable manifold.
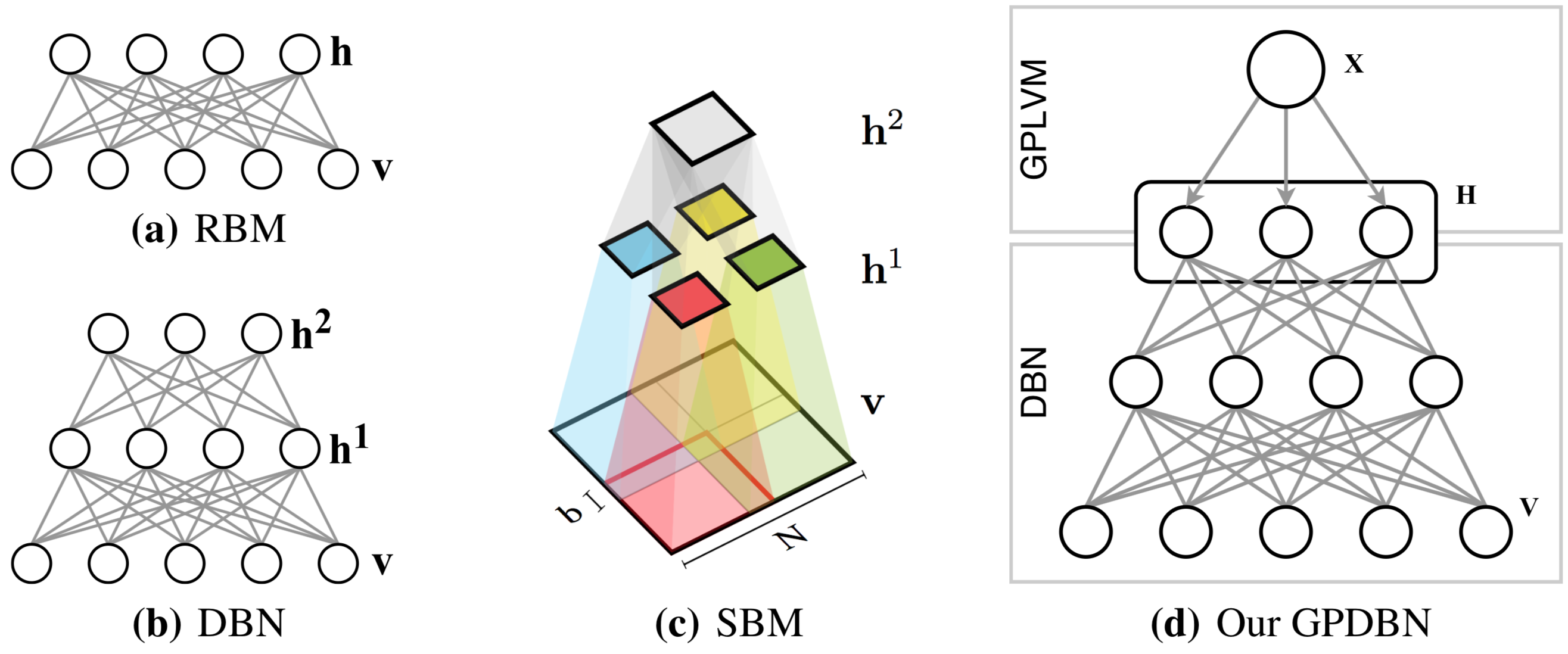
Model
Interactive GPDBN and GPLVM Manifold Demonstration
Please drag the red and white circle around the heat map to explore the manifold!
Select Zoom:

Unlikely Probability Likely
Different datasets and models may be selected from the drop-down menu. There are two models:
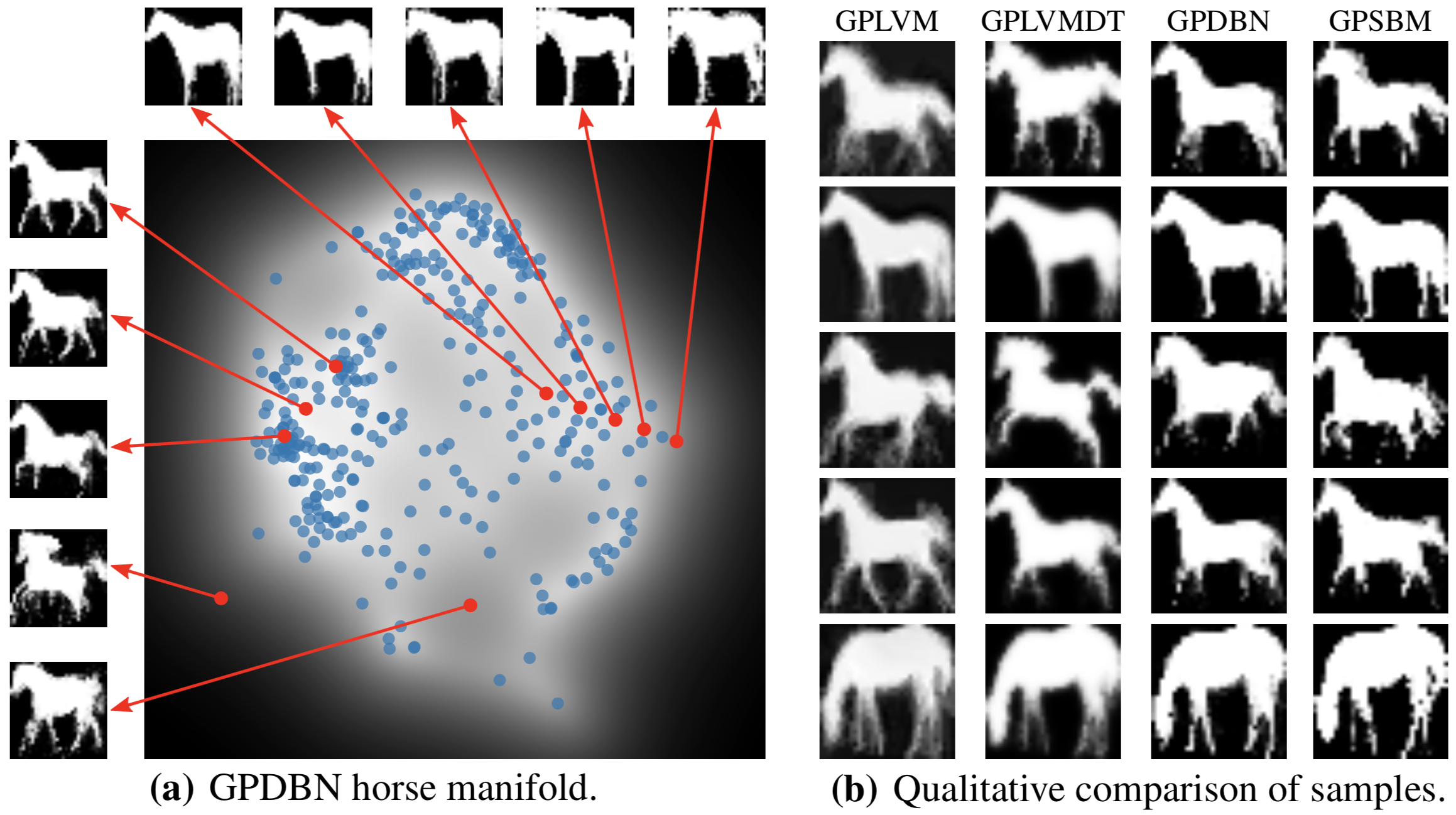
- GPDBN (at the top of the dropdown menu). These are the results of the model with the learned DBN likelihood model that results in more representative shapes without the artifacts from an enforced Gaussian likelihood.
- GPLVM (at the bottom of the dropdown menu). These are the comparison results for a standard GPLVM with a Gaussian likelihood (not appropriate for silhouette shape data).
The manifold is a probabilistic embedding and the heat-map provides an indication of the probability of finding a reasonable shape (measures the predictive variance). Regions in white have a low predictive variance (high probability) while regions in black have a high variance (low probability) and are less likely to produce representative shapes. The darkest black regions (away from the manifold) will return the an average shape. The filckering in the results is due to the model displaying an average obtained over a number of random samples propagated through the model.
Please note that the manifolds have been restricted to two dimensions for visualisation. The natural dimension of some of the manifolds may be higher and this can lead to separated islands. When performing other tasks with the manifold the natural dimensionality would be used. The blue dots indicate the embedded locations of the original training data.
Browser Compatibility: We have tested with the latest versions of Safari (7.0.1) and Chrome (32.0.1700.77).
Publication
Acknowledgements
This work was supported by the EPSRC CAMERA (EP/M023281/1) grant and the Royal Society.