ARC-Flow : Articulated, Resolution-Agnostic, Correspondence-Free Matching and Interpolation of 3D Shapes Under Flow Fields

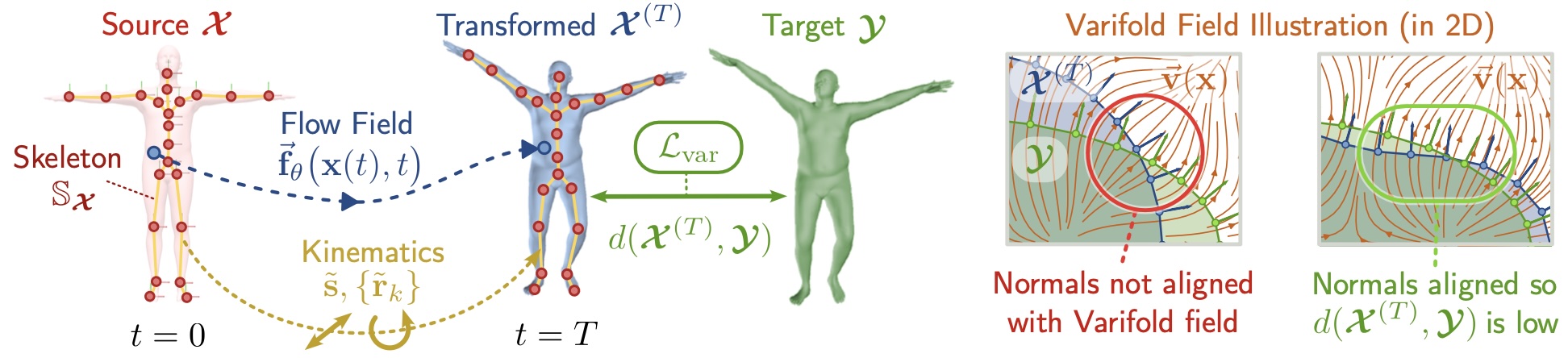
This work presents a unified framework for the unsupervised prediction of physically plausible interpolations between two 3D articulated shapes and the automatic estimation of dense correspondence between them. Interpolation is modelled as a diffeomorphic transformation using a smooth, time-varying flow field governed by Neural Ordinary Differential Equations (ODEs). This ensures topological consistency and non-intersecting trajectories while accommodating hard constraints, such as volume preservation, and soft constraints, e.g. physical priors.
Correspondence is recovered using an efficient Varifold formulation, that is effective on high-fidelity surfaces with differing parameterisations. By providing a simple skeleton for the source shape only, we impose physically motivated constraints on the deformation field and resolve symmetric ambiguities. This is achieved without relying on skinning weights or any prior knowledge of the skeleton's target pose configuration. Qualitative and quantitative results demonstrate competitive or superior performance over existing state-of-the-art approaches in both shape correspondence and interpolation tasks across standard datasets.
Physically Plausible Shape Interpolation without Correspondence
The goal is correspondence-free matching and interpolation between articulated shapes (i.e. pose variation rather than between two identities). We do not assume a shared triangulation between the two shapes so there can be differences in resolution, etc..
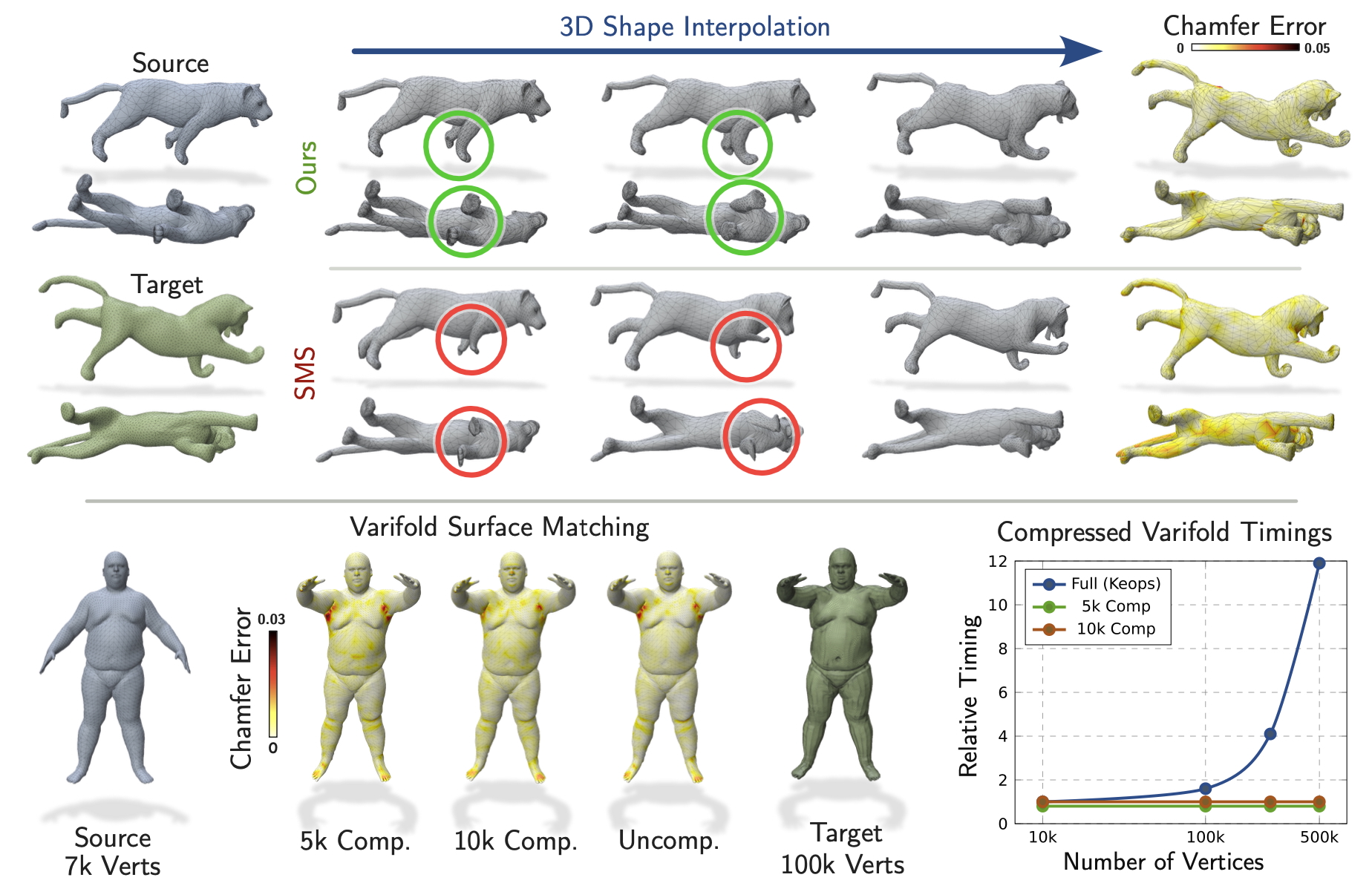
We use a “Varifold” matching metric from geometric measure theory. Whilst a direct implementation would yield a quadratic matching complexity in the number of vertices, we demonstrate that our new compression approach allows us to hugely reduce the complexity with minimal impact on matching performance.
Approach
The method comprises four key points:
-
Deformation via a diffeomorphic flow field to guarantee preservation of topology; the vector field is constructed to be divergence free and therefore preserves volume.
-
A varifold metric is used to ensure the deformed surface matches the target without known correspondence.
-
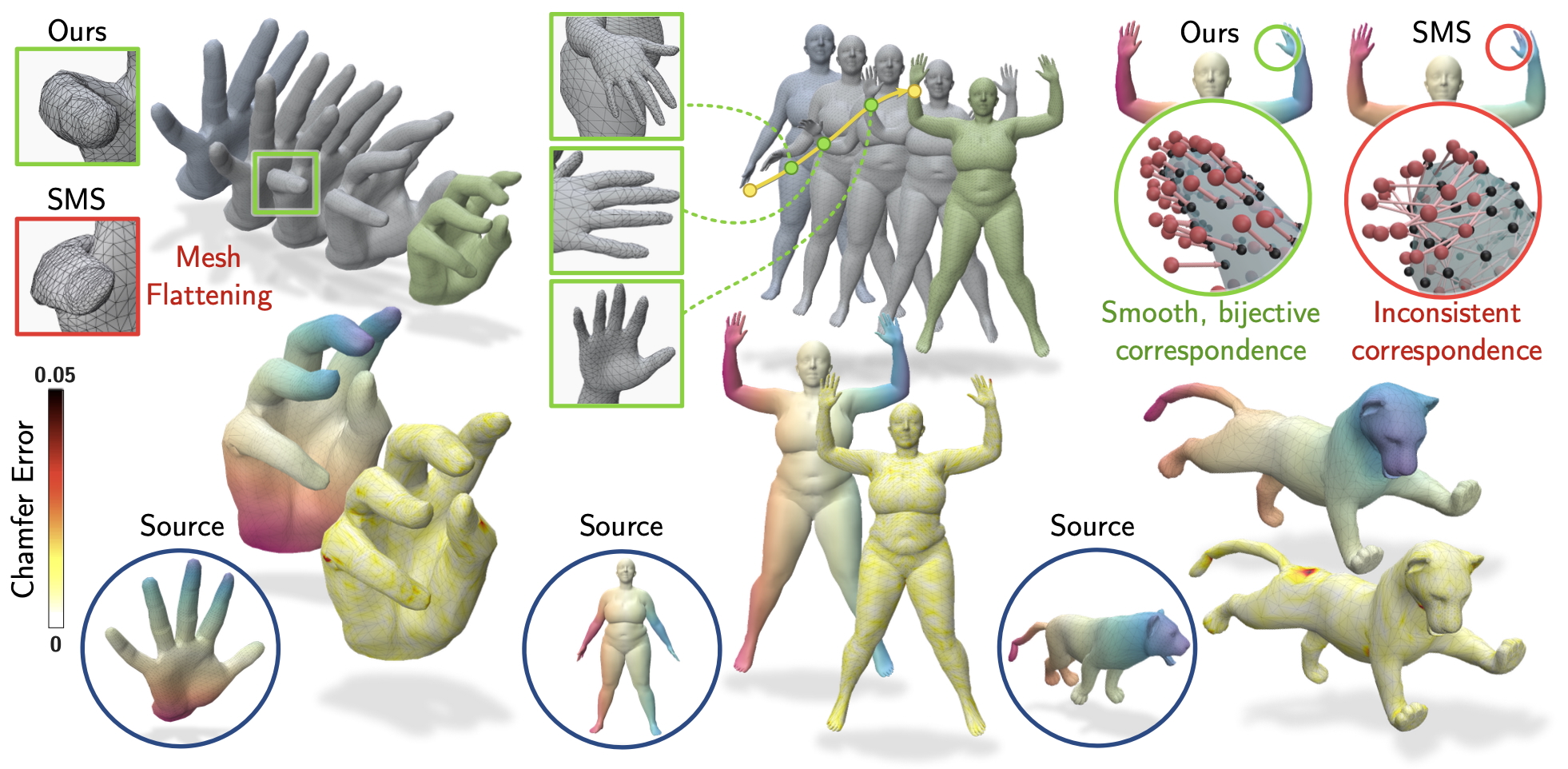
We supply the source with a simple, articulated internal skeleton and then force our field to infer the new skeletal pose automatically whilst promoting local rigidity.
-
The surface and soft tissue surrounding the skeleton are encouraged to deform in a conformal manner by incorporating physically inspired priors.
Results
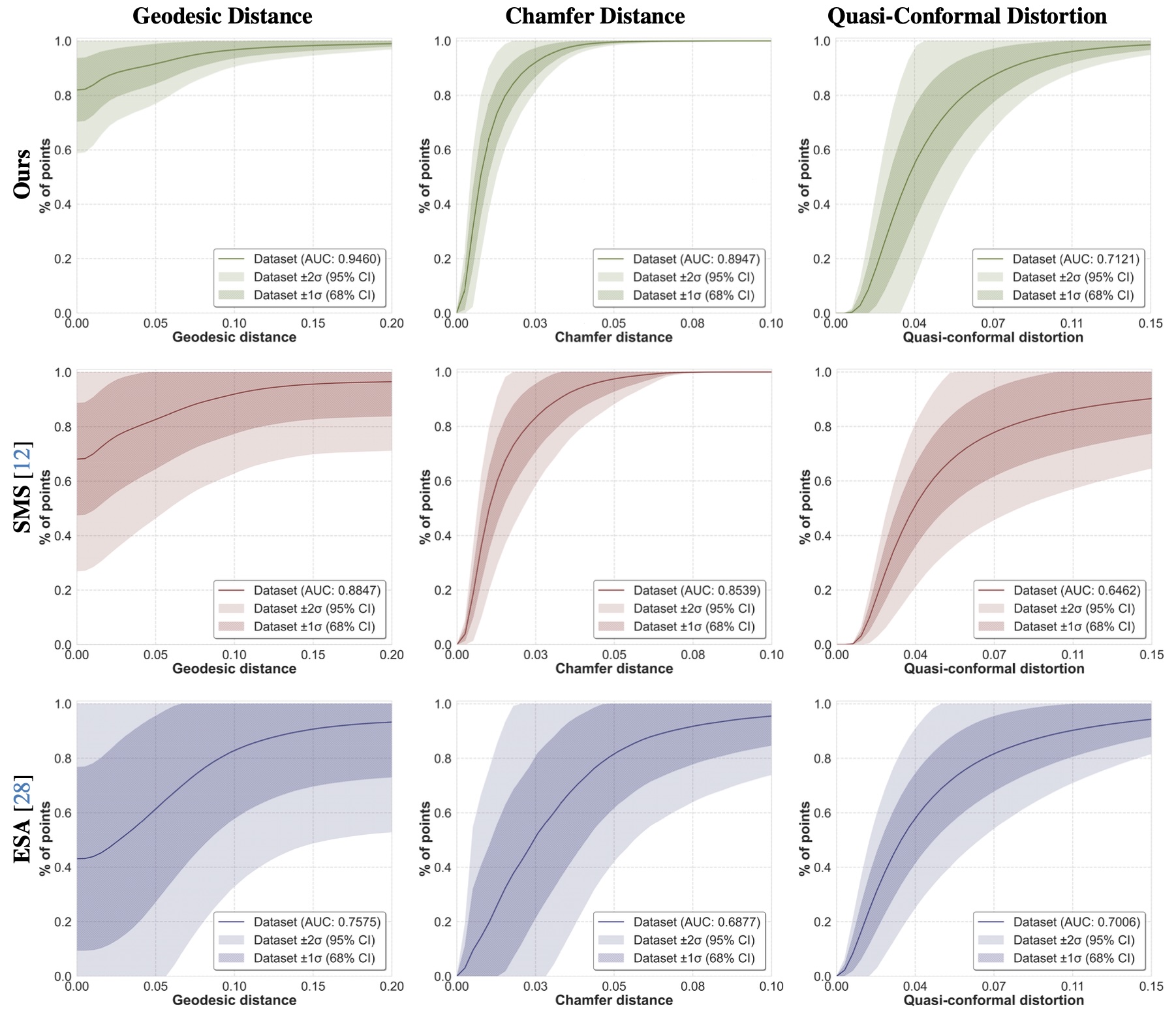
We show improved performance on three metrics:
-
Geodesic Distance: Between estimated and ground truth correspondence (measures point-to-point mapping accuracy)
-
Chamfer Distance: Between estimated and ground truth surface (measures overall shape similarity)
-
Conformal Distortion: Resulting from the interpolation (measures preservation of local geometric properties)
We also improve over methods where the correspondence is given and where large datasets are used for training; we require neither but we do need a simple skeleton to be provided for only the source shape. Further details are given in the paper.
We show illustrations of challenging examples from three standard datasets: FAUST, MANO and SMAL.
BMVA Symposium on 3D Vision Keynote Talk
Slides from a keynote talk entitled “A Hitchhiker’s Guide to Diffeomorphisms, Hamiltonian Flows and Geometric Measure Theory” at the BMVA Symposium on 3D Vision are available here.
Code
Please see the Curvature Enthusiasm git repository.
Publications
Allen Paul, Neill D. F. Campbell and Tony Shardlow,
SIAM Journal on Imaging Sciences, vol. 19, no. 1, 2026
[pdf] [arXiv link] [DOI: 10.1137/24M1699656]
Adam Hartshorne, Allen Paul, Tony Shardlow and Neill D. F. Campbell,
International Conference on 3D Vision (3DV), 2025
[pdf]
Acknowledgements
We are grateful for support from the EPSRC SAMBa Centre for Doctoral Training in Statistical Applied Mathematics (EP/L015684/1), the EPSRC CAMERA Research Centre (EP/M023281/1 and EP/T022523/1), UKRI Strength in Places Fund MyWorld Project (SIPF00006/1) and the Royal Society.